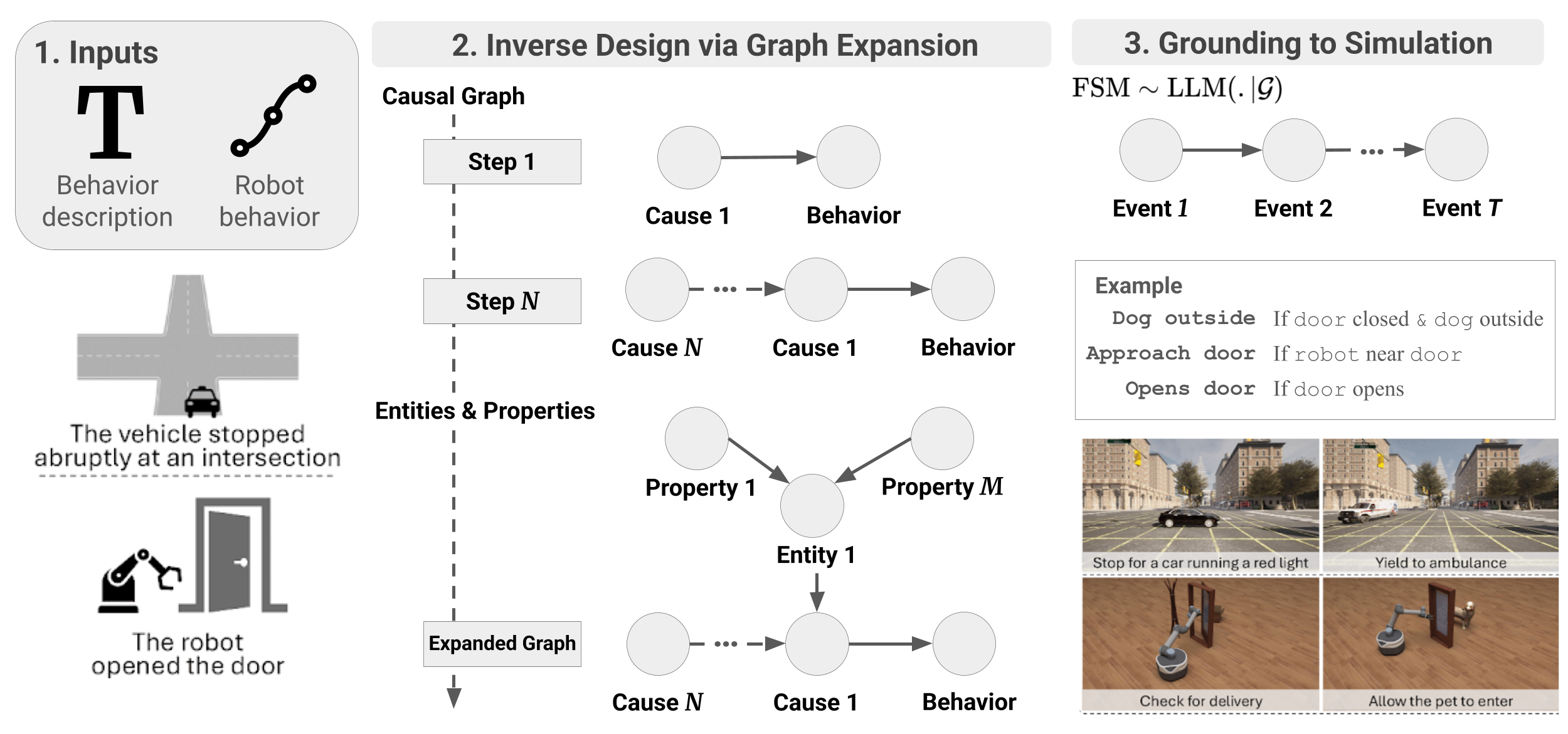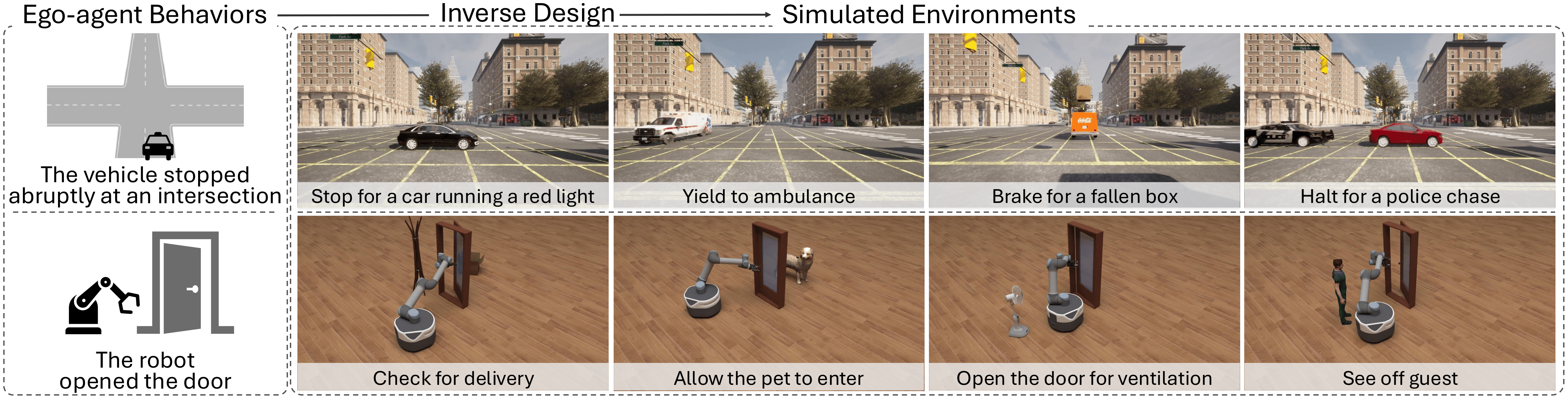
"The ego-vehicle was stationary at an intersection then began to move forward..."
Crossing with a malfunctioned traffic light →
Advancing after distracted driver moves →
Waiting for intersection to clear →
Yielding for ambulance at intersection →
Proceeding after pedestrian crosses street →
"The ego-vehicle was driving straight and then slowed down..."
Slowing to avoid SUV cut-in →
Slowing for lane closure congestion →
Yielding to overtaking ambulance →
Maintaining wary distance behind stopping truck →
Complying with police speed enforcement →
"The ego-vehicle changes lanes to avoid hazards or improve flow..."
Abrupt lane change to avoid debris →
Overtaking slow vehicle →
Clearing path for ambulance with lane change →
Merging to open lane →
Swerving to avoid wrong-way driver →
"The ego-vehicle was driving forward and then stops abruptly..."
Avoiding open door hazard →
Avoiding collision with elderly pedestrian →
Stopping abruptly due to highway accident →
Yielding safely to passing ambulance →
Braking for roadside assistance hazard →
"The ego-vehicle stops shortly after completing a turn at an intersection..."
Braking for occluded SUV at corner →
Stopping at a walking street →
Halting at unexpected police checkpoint →
Yielding to ambulance →
Picking up a passenger →
"The ego-vehicle stops at an intersection entrance..."
Yielding to ambulance →
Braking to avoid running a red light →
Stopping for a car running a red light →
Brake for a fallen box →
Halt for a high-speed police chase →